| Telepresence Robot |
 |
 |
 |
 |
 |
 |
 |
| Overview: This telepresence robot is based on a robot I helped build on my FIRST team (Robodogs #435) during 2001. FIRST (For Inspiration and Recognition of Science and Technology) is an organization that promotes exposure to engineering through a teamwork based high school robotics competition. This design serves as a modular test bed for examination of robotic control and sensor systems. The particular control system used is not documented on this sub-page, see Basic Stamp 2 Control System.
|
|||||||||||||||||||||||||||
| System Overview:
|
|||||||||||||||||||||||||||
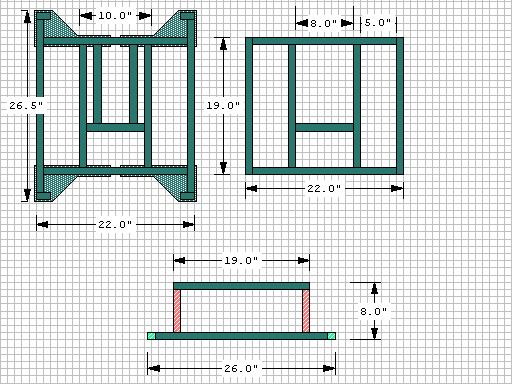 |
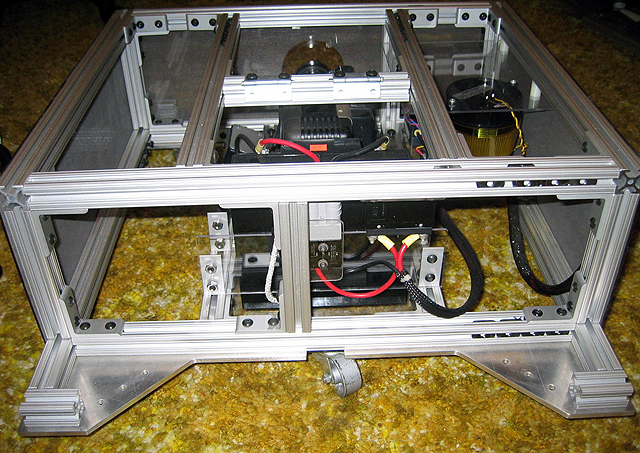
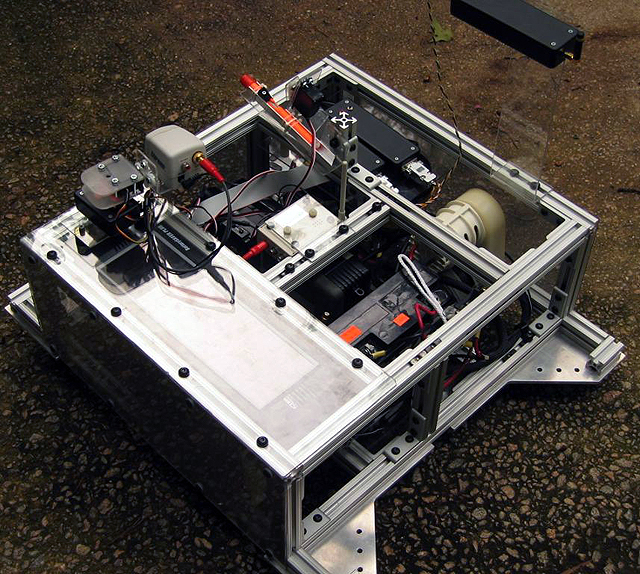
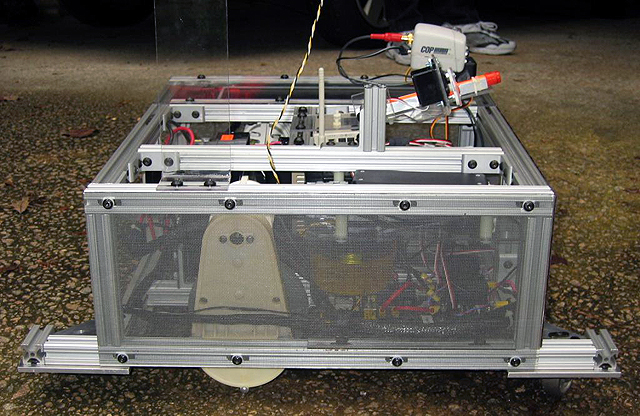
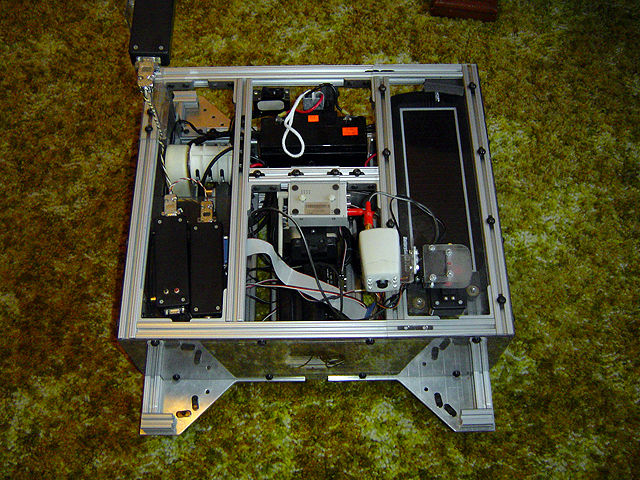
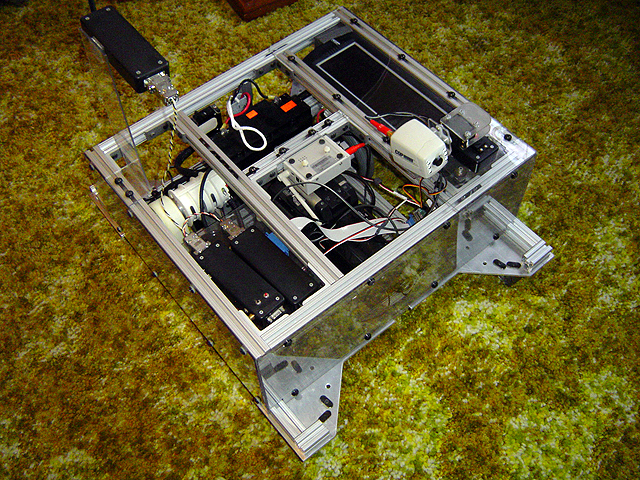
Robot Frame: Robot's frame is constructed out of 8020 Aluminum extrusion. Extrusion is joined with 4 hole L brackets. Components are mounted on polycarbonate panels. |
||||||||||||||||||||||||||
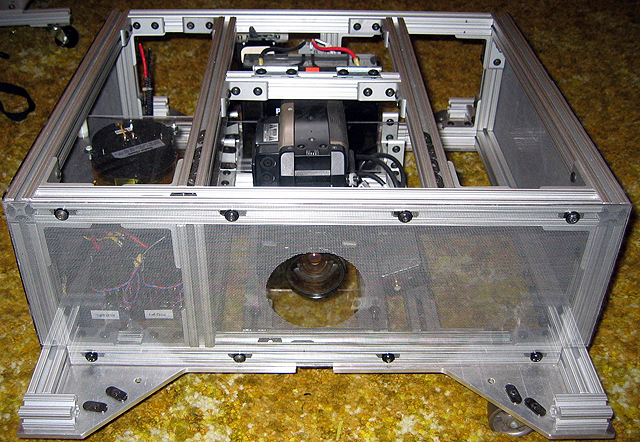 |
Robot (spring 2003): Frame front with main camera |
||||||||||||||||||||||||||
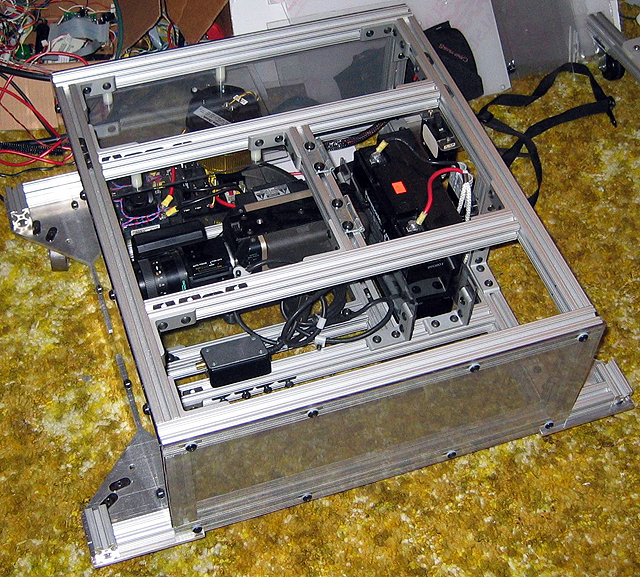 |
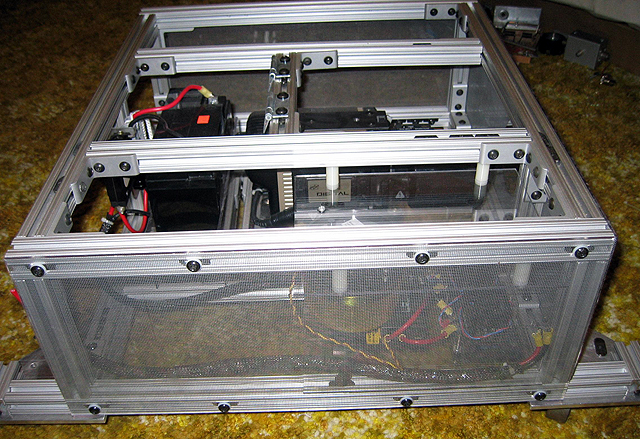
Robot (spring 2003): Frame side |
||||||||||||||||||||||||||
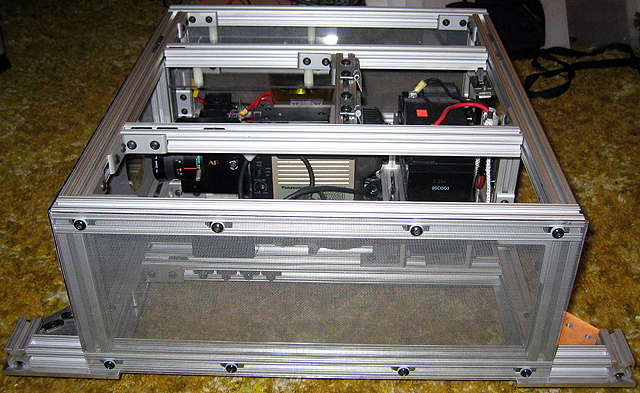 |
Robot (spring 2003): Frame side |
||||||||||||||||||||||||||
 |
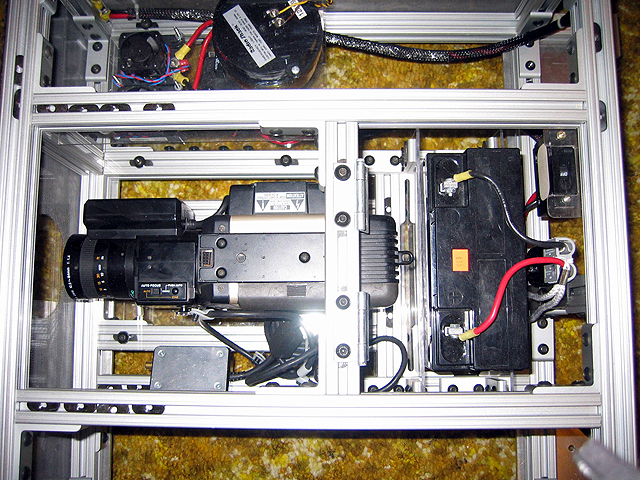
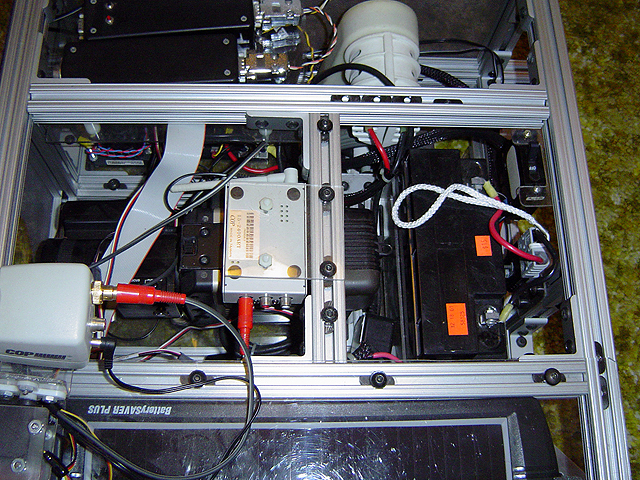
Robot (spring 2003): frame back showing lead acid battery |
||||||||||||||||||||||||||
 |
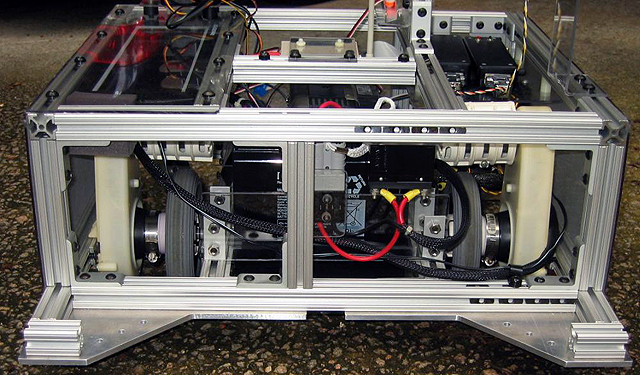
Robot (spring 2003): frame side showing motor controllers |
||||||||||||||||||||||||||
 |
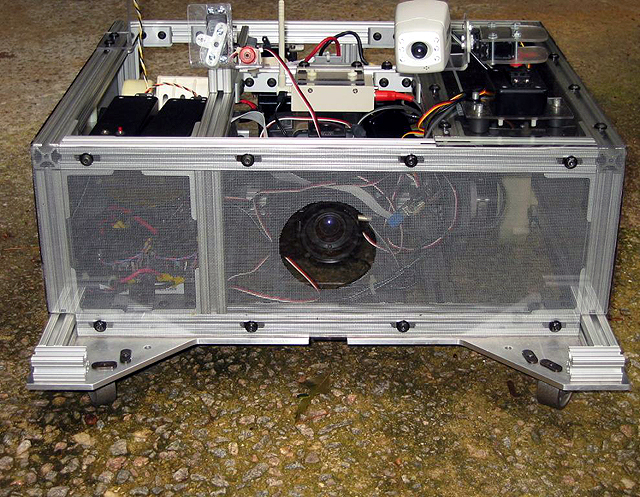
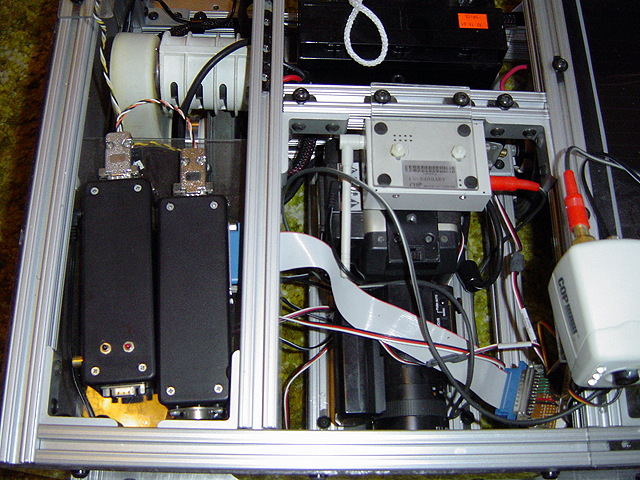
Robot (spring 2003): Robot front showing camera turret and video transmitter |
||||||||||||||||||||||||||
 |
Robot (spring 2003):
|
||||||||||||||||||||||||||
 |
Robot (spring 2003):
|
||||||||||||||||||||||||||
 |
Robot (spring 2003): Robot back showing power wheels motors and wheelchair wheels |
||||||||||||||||||||||||||
 |
Robot (spring 2003): Back corner |
||||||||||||||||||||||||||
 |
Robot (spring 2003): Back corner showing serial data radio |
||||||||||||||||||||||||||
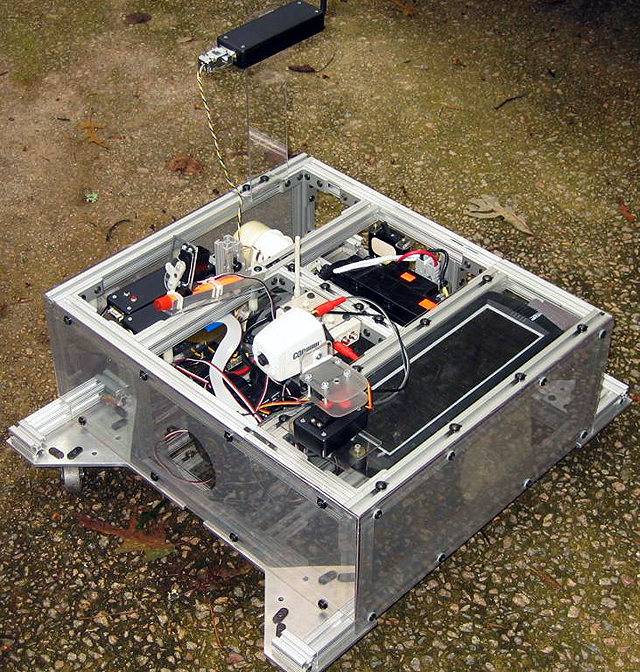 |
Robot (spring 2003): front corner showing camera turret |
||||||||||||||||||||||||||
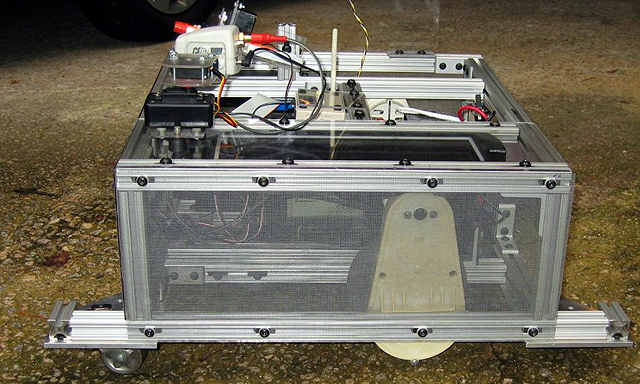 |
Robot (spring 2003): side showing power wheels motors and wheelchair wheels |
||||||||||||||||||||||||||
 |
Robot (spring 2003): side showing power wheels motors and motor speed controllers |
||||||||||||||||||||||||||
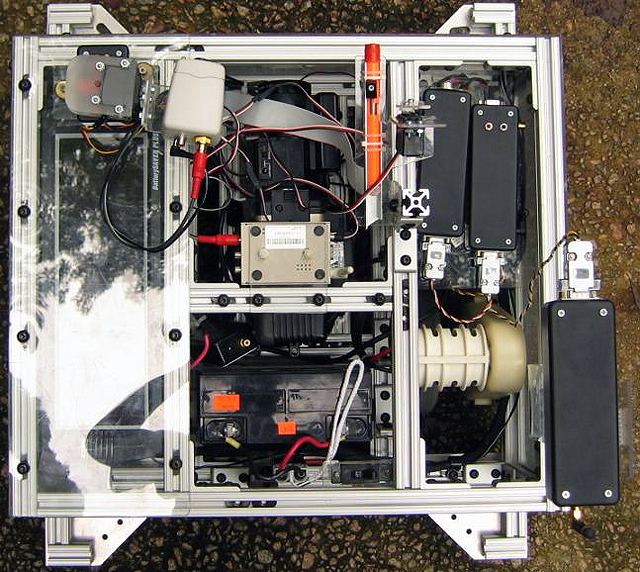 |
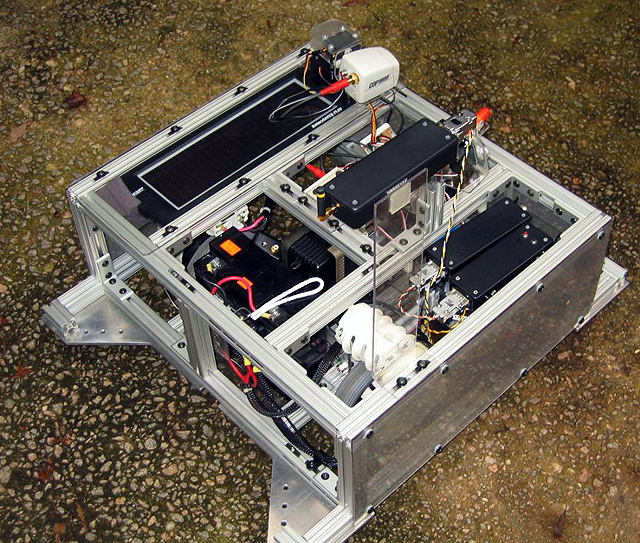
Robot (spring 2003): Top |
||||||||||||||||||||||||||
 |
Robot (spring 2003): Top center |
||||||||||||||||||||||||||
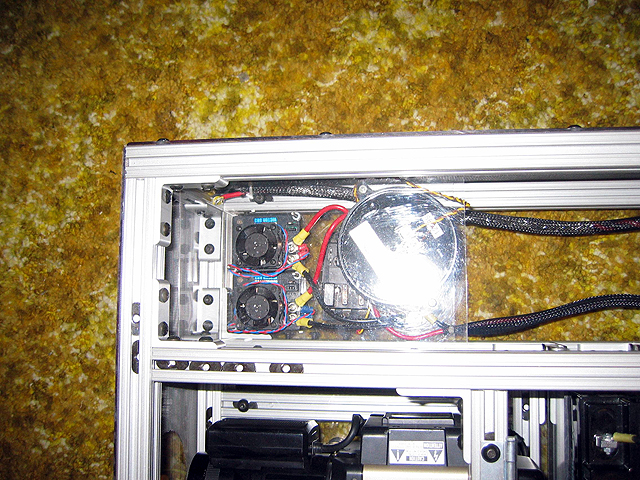 |
Robot (spring 2003): Top side showing speed controllers |
||||||||||||||||||||||||||
 |
Robot (spring 2003): Top |
||||||||||||||||||||||||||
 |
Robot (spring 2003): Front corner |
||||||||||||||||||||||||||
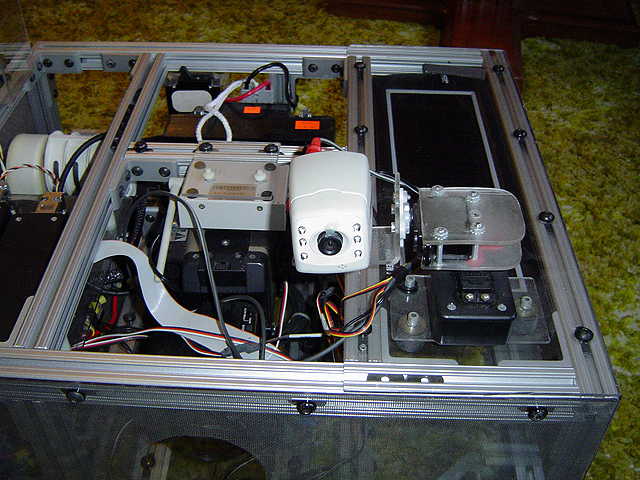 |
Robot (spring 2003): Camera turret |
||||||||||||||||||||||||||
 |
Robot (spring 2003): Top center |
||||||||||||||||||||||||||
 |
Robot (spring 2003): Top front |
||||||||||||||||||||||||||
By attempting to reproduce any experiments or devices listed on this domain in part or in whole, you agree to hold me harmless against any lawsuit or liability. Copyright © 1998 - 2005 by Andrew Seltzman. All rights reserved. |
|
| Contact me at: admin@rtftechnologies.org | |